Publicado por Oscar Gonzalez
en Tecnología
el 08/11/2007
Publicado por Oscar Gonzalez
en Tecnología
el 08/11/2007
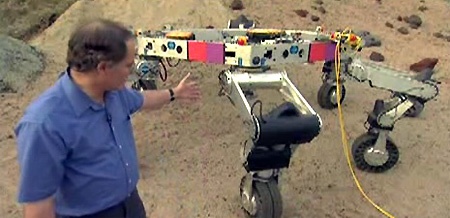
Este robot dise�ado por los ingenieros de la NASA est� pensado para recorrer facilmente la superficie lunar en breve. Se encuentra en su fase de pruebas y visto el video lo llevan muy bien.
Es un robot con 6 patas y en cada una lleva una rueda que le permite girar en cualquier direcci�n, o lo que es m�s impresionante, usar sus patas para andar o realizar una tarea como perforar el terreno.
Cabe destacar la extrema precisi�n de sus movimientos al mover sus partes m�viles. Desde luego, la programaci�n de este engendro debe de ser una absoluta locura!
Video sin desperdicio a continuaci�n...
Relacionado:
- (Video) LittleDog: El robot andador que analiza el terreno
- (Video) Mowgi: El robot que salta como una rana
- Robot PHOBOS
- Como dise�ar un brazo robot
- (Video) Robot Hexapod con reconocimiento facial
via techeblog
Leer más
Publicado por Oscar Gonzalez
en Tecnología
el 02/11/2007
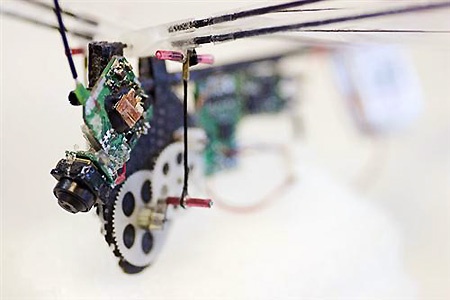
Este microrobot de tan solo 16 gramos es capaz de volar durante unos 15 minutos de una forma muy parecida a la de una lib�lula. Por si fuera poco, tiene una c�mara integrada que permite visualizar en tiempo real todo el trayecto.
Video a continuaci�n...
Relacionado:
- (Video) Competici�n de robots con juego "Operaci�n"
- (Video) El robot que sirve cervezas
- (Video) Mowgi: El robot que salta como una rana
- (Video) Robot cienpies controlado por PIC
- (Video) Robot de seguridad controlado por Internet
via techeblog
Leer más
Publicado por Oscar Gonzalez
en Electrónica
el 20/10/2007
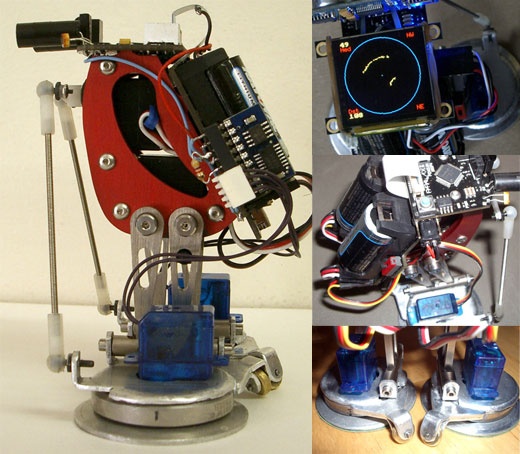
Aqui un estupendo proyecto del usuario Interact del foro de Parallax. Se trata de su propia version de un robot pinguino b�pedo que usa un controlador Pololu de Parallax para controlar unos servomotores. Tambi�n dispone de un sistema de sonar que mediante una pantalla uOLED-180 es capaz de interpretar los obst�culos que encuentra a su alrededor.
Me ha llamado la atenci�n la parte mec�nica del b�bedo ya que usa un interesante sistema de balancedo con un servomotor central con dos brazos agarrados a las piernas. Tambi�n tiene capacidad para girar sus pies y asi poder cambiar de direcci�n en cualquier momento. El video muestra que es muy estable cuando camina incluso sin tener ning�n sistema complejo de 4 servos por pierna como tiene por ejemplo el robonova o robots b�pedos similares.
El video a continuaci�n no tiene desperdicio...
Enlaces:
- Robot pinguino (parte 1)
- Robot pinguino (parte 2)
- Robot pinguino (parte 3)
Relacionado:
- Robby: El robot b�pedo espa�ol
- (Video) Mowgi: El robot que salta como una rana
- (Video) Robot ultra peque�o con 8Kb de memoria
- Robot b�pedo de radiocontrol
- (Video) Competici�n de robots con juego "Operaci�n"
- (Video) Roller-Walker: El robot sobre patines
- (Video) Robot Hexapod con reconocimiento facial
- (Video) Robot cienpies controlado por PIC
Leer más
Publicado por Oscar Gonzalez
en DIY
el 05/10/2007
Este estupendo robot esta controlado por un modulo CUBLOC de Comfile junto con un router Linksys para enviar las imagenes de una c�mara IP. Tambi�n se controla el robot en tiempo real mediante un peque�o software.
Impresionante trabajo de David Shelat
Video a continuaci�n...
Relacionado:
- MCUcam : La c�mara inteligente
- Instala una camara en tu avi�n RC
- Avi�n RC con giroscopio y camara integrada
- Robot cienpies
- (Video) RC acrob�tico indoor
- (Video) Robot Hexapod con reconocimiento facial
via zedomax
Leer más
Publicado por Oscar Gonzalez
en Tecnología
el 30/09/2007
Martin Buehler es el principal desarrolador y due�o de Boston Dynamics, empresa dedicada a la investigaci�n rob�tica de movimiento. Hemos disfrutado en su dia con su mula electr�nica mula electr�nica y tambien con LittleDog. Hoy os dejo aqui su ultimo invento, o por lo menos en lo que est� investigando ultimmamente ya que el video tiene fecha del 2002.
Se trata de un robot de un pi� montado dentro de una carcasa parecida al de una moto.
Se llama Robot Jocket y el video no tiene desperdicio...
Relacionado:
- La mula electr�nica
- (Video) LittleDog: El robot andador que analiza el terreno
Leer más