No es la primera vez que hablo por aqui de Johnny Chung Lee. A este hombre le falta poco para tener su propia entrada en la Wikipedia o ser fichado directamente por Nintendo. En anteriores ocasiones, hemos visto su sistema de Finger Tracking y en esta ocasi�n, utilizando el mando de la Wii y unas gafas con dos sensores, demuestra como conseguir tecnolog�a head tracking (esto es, que cambia la perspectiva de lo representado en funci�n de la posici�n de la cabeza) para crear una ilusi�n tridimensional real en una pantalla normal y corriente.
En su web, nos facilita el software desarrollado en C# y utilizando Direct X.
Video altamente recomendado y enlace a su web a continuaci�n...
No se si os ha pasado alguna vez al estar buscando documentaci�n por aqui y por all� y al final os liais en las diferentes webs hasta encontrar algo que os llama la atenci�n que no tiene nada que ver con lo que buscabas en un principio. Pues hoy me ha pasado!
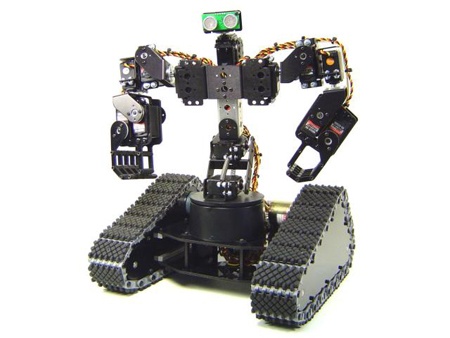
Resultase que navegando por ahi buscando algo de documentati�n t�cnica para un proyecto que tengo en la rec�mara, me he encontrado con este estupendo Robot Johnny 5 que puede ser controlado desde un PC mediante el puerto s�rie o tambi�n por Bluetooth.
Este robot de unos 30 cent�metros de alto se vende en Kit para montar en lynxmotion por cerca de 1000$. Lo que es barato no es... pero tiene que ser genial tener uno de estos... verdad Bruce? ;)
Y para conseguir que la boca se os haga aguita, os dejo un video del cacharro funcionando a continuaci�n...
BONUS: Y para m�s a�n si cabe, os dejo aqui este enlace a una imagen que os va poner los pelos de punta: Imagen matadora aqui. Y por si todav�a quereis m�s y os va la ca�a, aqui os dejo otro enlace interesante con muuuchas fotos.
El robot Johnny 5 es de sobra conocido por la pelicula "Corto Circuito" de los a�os ochenta y a�n hoy en d�a no deja de ser un estupendo proyecto robot extremadamente bien dise�ado y absolutamente geek :)
Dise�ado originalmente por Dr. Newton y Benjamin Jahrvi para la pelicula, hoy os dejo aqui varios videos de un proyecto de Richard que est� montando su pr�pia versi�n de Johnny 5.
Lleva aproximadamente dos a�os dise�ando su prototipo y posee ya gran parte de los casi 40 servomotores y partes neum�ticas necesarias para el movimiento del robot. Como detalle curioso, solo en la cabeza, se estima alrededor de 20 servos para poder mover sus pesta�as, ojos etc.
He tenido el placer de hablar hace unos d�as con Richard (maj�simo porcierto) y se muestra bastante optimista sobre su proyecto aunque reconoce que no es barato y a�n queda mucho por hacer.

{kind=link}