Publicado por Oscar Gonzalez
en Robótica
el 27/06/2012
Publicado por Oscar Gonzalez
en Robótica
el 27/06/2012
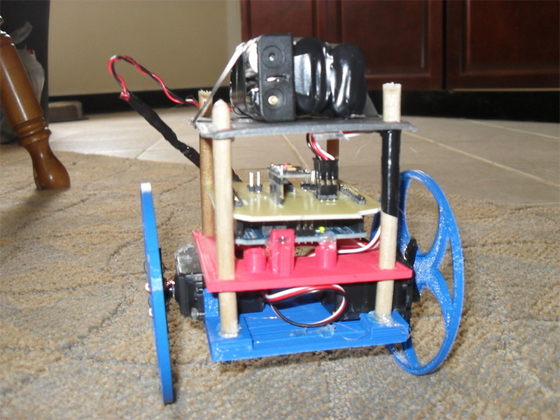
Esta claro que la impresión casera en 3D está revolucionando la forma en la que hacemos proyectos y este pequeño robot es la prueba de ello. Es un pequeño robot balancing, de estos que consiguen mantenerse en equilibrio sobre sus dos ruedas, con la diferencia que practicamente todas sus piezas están impresas en una impresora 3D, salvo la PCB por supuesto. Esto es muy interesante para todo aquel que disponga de una impresora de este tipo, ya que puedes bajar los planos de thingiverse, imprimirlos, montar luego la electrónica sobre el robot y voilà!
Quien se anima a imprimirlo? sabemos que todos los que teneis una impresora 3D no os podreis resistir... ;)
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 19/06/2012
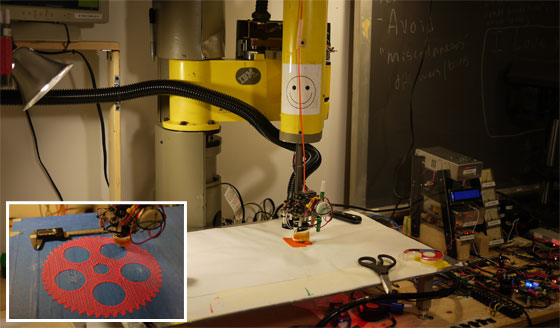
Dan Kouttron desde Estados Unidos nos envía el resultado de su último proyecto. Se trata de un pequeño brazo robot industrial IBM 7575 SCARA convertido en una impresora 3D. Ha tenido que adaptar bastantes cosas ya que incluso se ha fabricando el soporte caliente para imprimir con seis resistencias de potencia de 25 W, las cuales consumen unos 8,6 Amperios (unos 220W) a 26 V y pueden calentar hasta 150 grados centígrados, aunque lo hace funcionar alrededor de los 65 grados, una temperatura de fusión correcta para el plástico ABS que utiliza. De lo contrario que puede uno pensar, el brazo robot original no funciona con motores paso a paso, sino con potentes motores de corriente contínua montados sobre unos encoders muy precisos para controlar el movimiento. El brazo pesa nada más y nada menos que unos 90 kilogramos.
En su web se puede leer con extremo detalle todo el proceso de fabricanción de toda la electrónica de control así como los ajustes PID, la cinemática inversa usada para controlar los movimientos y otras muchas cosas muy interesantes y complejas. Os dejo unas imágenes a continuación y un vídeo del brazo robot en funcionamiento que no tiene ningún desperdicio. Insisto, no os perdais su web, es realmente impresionante el trabajo de Dan!
Leer más
Publicado por Andoni Diaz Puerta
en Electrónica
el 27/05/2012
Para todo aquél que haya hecho un proyecto sobre robótica, en el que se requiera un mínimo de estabilidad en el proceso, linealidad y el mínimo error posible, sabrá que no es una tarea fácil.
Como ya se ha hablado incontables veces en el blog, un PID es una solución evidente ante este problema, pero presenta un complejo de ajuste e implementación en nuestros códigos, que por suerte se suple con las numerosas librerías ya preparadas para estas tareas en nuestros entornos favoritos (Arduino, MBED, Maple...).
Recientemente he estado trabajando en un robot seguidor de lineas, en el cual he llegado a implementar el PID, todo para mi proyecto de final de curso y el resultado(sobre el cual hablaremos en otra ocasión), ha sido excelente, una mezcla explosiva entre eficiencia y velocidad.
En esta ocasión os mostraremos varios recursos para intentar comprender, ajustar y optimizar este excelente algoritmo!
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 04/04/2012
MorpHex es un impresionante robot con forma de pelota creado por Kåre Halvorsen que oculta bajo su carcasa un robot hexápodo. A parte de la própia complejidad de movimiento que implica un hexápodo, también es capaz de desplazarse rodando, aunque el autor indica que por el momento y debido a la falta de simetría de sus piezas, sólo lo puede hacer hacia un lado.No he encontrado demasiados detalles sobre su funcionamiento, pero lo primero que me viene a la cabeza es que debe tener algún tipo de sensor de orientación para saber en qué posición se encuentra cuando está rodando. Lo más probable algúna combinación de acelerómetros y giroscópio y por supuesto un montón de servos.
Es un trabajo aún por terminar pero éste impresionante robot seguro que le está dando muchos dolores de cabeza a su autor!
No os perdais los vídeos a continuación que no tienen desperdicio...
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 26/03/2012
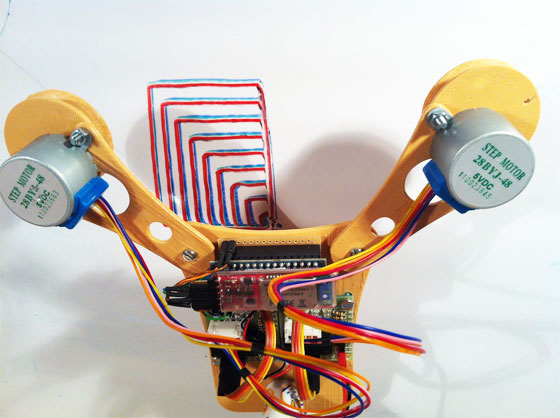
Nuestro amigo Miguel Ángel nos envía información y un excelente vídeo sobre su último robot llamado GarabatoBOT. Es un robot capaz de realizar simples bocetos en una pizarra blanca vertical. El diseño es realmente simple y su estructura ha sido impresa en una MakerBOT (ROBCIB-Maker) en plástico ABS marrón. Se pueden incluso descargar las piezas en thingiverse para reproducirlo.
No os perdais el enlace con más detalles del proeycto y el estupendo vídeo a continuación... Gracias Miguel!
Leer más