Publicado por Oscar Gonzalez
en Robótica
el 05/11/2021
Publicado por Oscar Gonzalez
en Robótica
el 05/11/2021
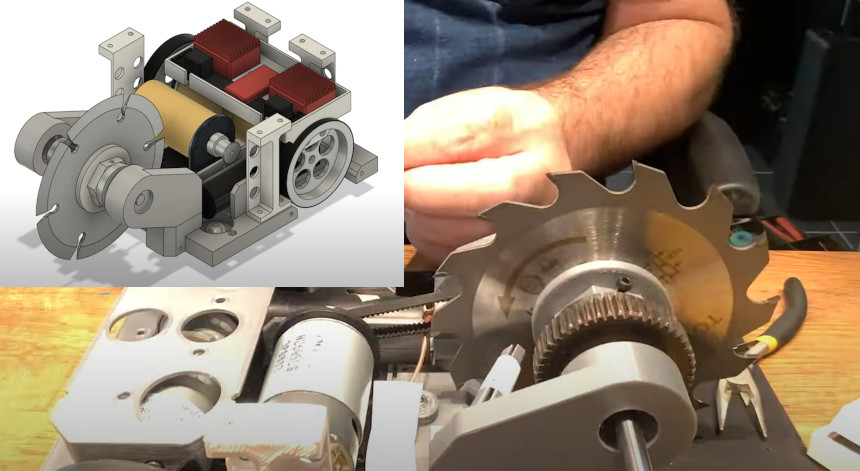
Hay varias clases de robots de combate y normalmente se clasifican en función a su peso. El que te dejo hoy aquí tiene un límite de 4 kilos de peso en su correspondiente competición. Puede parecer bastante, pero una vez sumas componentes pesados como baterías y armas, no queda mucho margen de maniobra.
Éste robot de combate tiene un chasis impreso en 3D y su arma es el clásico disco de sierra dentado y que puede dejar mucho daño en su contrincante. Pero además, el disco es capaz de generar descargas eléctricas para intentar hacer todavía más daño.
A continuación vemos a su autor explicarnos cómo ha realizado su montaje.
Leer más
ZeroBug es un robot creado por Max Kern que utiliza 18 servos para crear éste fantástico hexápodo. En cuanto a la electrónica de control utiliza varias cosas. Por un lado un STM32 se encarga del control puro de los servos así como de la cinemática inversa. Luego, una Raspberry Pi Zero se encarga de la parte de control generando una interfaz web con los mandos. También puede controlador mediante un mando inalámbrico Bluetooth. La placa de control STM32 se comunica con la Raspberry Pi mediante el puerto serie.
Todo el cuerpo está impreso en 3D y tiene un tamaño bastante compacto. Además, utiliza servos muy baratos, en concreto el modelo ES08A para el coste total del robot sea muy ajustado. Dispone de una completa página en Github con todos los detalles para construcción, así como una entrada en hackaday.io.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 19/08/2021
Casi terminando con su carrera en ingeniería mecánica, el estudiante del Instituto de Tecnología Rose-Hulman, Josh Eckels, se puso a construir un robot controlado por IA que juega al ajedrez contra un oponente humano. El sistema es esencialmente un cubo gigante formado a partir de perfiles de extrusión de aluminio con un gran tablero de ajedrez en su base. Muchas de las piezas utilizadas ya las conocemos bien ya que la gran mayoría se utiliza en casi todas las impresoras 3D.
Para crear el robot, ha utilizado cuatro motores paso a paso en total para mover la pinza que agarra las piezas, incluido uno para el eje X, otro para el eje Y, un motor que hace girar una varilla roscada para levantar la pinza y un motor final que gira para abrirla o cerrarla. Todos estos motores se conectan a una placa Arduino UNO con una CNC Shield conectada. Todo el conjunto se conecta por USB a una Raspberry Pi que ejecuta el motor de ajedrez Stockfish.
Stockfish es un gran motor de ajedrez que realiza un seguimiento del estado actual del juego y realiza movimientos de acuerdo con el nivel de habilidad seleccionado. En los rangos superiores, se vuelve casi imposible de vencer por un humano.
El jugador selecciona en una pantalla dónde quiere colocar su pieza, lo que hace que el robot la recoja y la coloque en otro lugar. Posteriormente, el motor hace su movimiento.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 28/05/2021
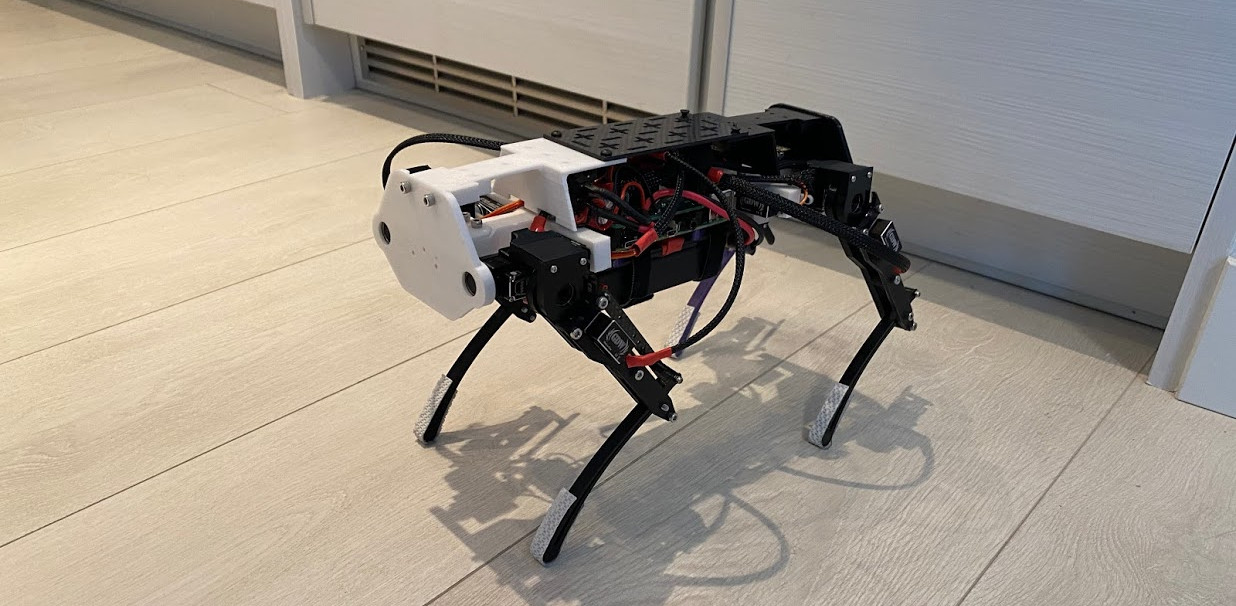
Andres Flores nos envía su nuevo robot, en esta ocasión un perro robot al que ha llamado Pavlov Mini. El robot utiliza el entorno ROS y está construido totalmente desde cero. En los próximos videos nos promete ir explicando en detalle su proceso de contrucción y algoritmos. Tampoco os perdais sus anteriores videos
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 19/05/2021
Éste simpático robot se llama Yuki y es un cuadrúpedo capaz de andar sobre superficies lisas. Del control principal se encarga una Raspberry Pi con un software tipo ROS. Éste tipo de robots son bastante difícil de poner a funcionar y afinar ya que tanto el peso como el diseño del robot son críticos para un buen funcionamiento. Aún así, éste robot impreso en 3D lo hace bastante bien y en su web podéis ver más detalles.
Leer más