 Publicado por Oscar Gonzalez
en Arduino
el 11/09/2013
Publicado por Oscar Gonzalez
en Arduino
el 11/09/2013
Pedro García nos envía su proyecto de un cortacesped casero controlado con Arduino. Está en fase de desarrollo pero lo tiene ya bastante avanzado. Está hecho con un chasis de madera DM y para moverlo utiliza dos motores de limpiaparabrisas de un Peugeot 205. El control está hecho con una placa Arduino y una serie de relés que controlan el avance y retroceso. Actualmente está trabajando en un sistema de hilo para delimitar el área de trabajo del robot para que no se escape, basado en señales RF de 62,5 MHz.
El proyecto está muy completo y Pedro continúa mejorandolo poco a poco. No os perdais unos vídeos y el enlace a su web a continuación. Gracias Pedro por enviar tu proyecto!
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 09/07/2013
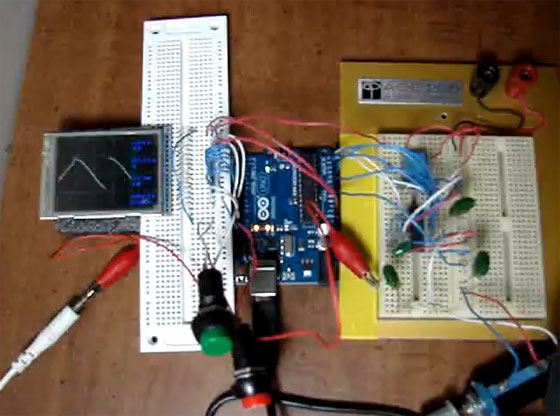
Una de las herramientas de medición más importantes cuando te codeas con proyectos algo complejos es el Osciloscopio. Es una herramienta magnífica pero tambien no al alcance de todos ya que uno decente suele ser relativamente caro, aunque existe alternativas más baratas como los Rigol DS1052E o incluso modelos USB, el mayor problema suele ser el tiempo de captura o dicho de otro modo el ancho de banda. Por otro lado, se pueden medir señales analógica con un Arduino ya que dispone de un ADC de 10bits pero está claro que el tiempo de captura sigue siendo un problema. Me ha parecido muy interesante el proyecto de Bob Davis que utiliza un chip especializado CA3306 de Intersil que es basicamente un conversor analógico/digital que puede capturar a la friolera de 15 Mhz. En su salida ofrece un sencillo bus de datos y se conforma con muy pocos componentes externos. Está claro que seguiremos teniendo un cuello de botella en la entrada de Arduino, pero afinando bien el programa y recogiendo grupos de paquetes, Bob ha conseguido capturar unos 5 millones de samples por segundo.
Un ultimo problema es conseguir renderizar el resultado lo suficientemente rápido en una pantalla LCD, pero eso ya es otra historia. No os perdais el vídeo y enlace a la web de Bob!
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 28/06/2013
Germán Villalba nos envía desde Cartagena (España) un vídeo de su impresionante proyecto de una réplica a escala 1/5 del submarino Peral realizado por los alumnos del IES Cartagena. El Peral fue un prototipo de submarino con propulsión eléctrica realizado por la Armada Española en 1888 y aunque en esos tiempos no fue la primera vez que se planeaba la construcción de un buque que navegaba en inmersión, la novedad era que se propulsaba por medio de la energía eléctrica.
La réplica en cuestión pesa la friolera de 817 Kg y dispone de dos motores de propulsión de 1/2 CV cada uno, y dos motores de elevación de 1/4 CV, más dos bombas de achique y otra para llenar y vaciar el tanque de lastre. Incorpora un sensor de inundación en cada compartimento, más sensor de temperatura y un acelerómetro ADXL345. Todo ello controlado a través de un Arduino MEGA 2560 dentro de la caja negra (de color naranja) dentro del submarino. Unos módulos ER400TRS comunican al arduino Mega con la aplicación desarrollada en Java que se ejecuta en el portátil, donde se muestran los datos de los sensores y se actúa sobre los motores y bombas
El proyecto está en fase de pruebas y el grupo dispone de una página en Facebook donde ver los avances. Para ir abriendo boca, nos dejan un vídeo de las primeras pruebas, por cierto muy prometedoras.
Gracias Germán por enviar tu proyecto, quedamos a la espera de más noticias! :)
Leer más
Publicado por Oscar Gonzalez
en Tecnología
el 21/06/2013
Me ha parecido impresionante el trabajo de Benoit Frigon que se ha montado un completo sistema de telefonía basado en Asterisk, montado de una forma absolutamente elegante en una caja rack de 19 pulgadas. La ventaja de este tipo de sistemas es enorme ya que Asterisk tiene un buen puñado de funcionalidades y además, por los pocos recursos que consume, se puede montar en equipos muy modestos y por lo tanto que consumen muy poco. Benoit ha utilizado una pequeña placa Alix 2D2 que funciona a tan solo 500MHz con 256Mb de RAM y con el sistema en una memoria Compact Flash.
El montaje y configuración del PBX tiene su aquel pero es relativamente sencillo. Nosotros aquí tenemos montado un sistema muy similar sobre una Raspberry Pi en su caja y va de coña. Tenemos incluso la melodía de espera con joyas como la mítica Super Mario main tune, Tetris o la BSO del imprescindible Castle Vania para amenizar la espera, todos con el mítico sonido 8 bits (sí, somos unos frikis). Algún día publicaremos algunas foticos :D. Pero el acabado de Benoit es impecable ya que se ha fabricando él mismo una caja rack de 19 pulgadas de aluminio para colocarlo todo en su armario actual. Lo acompaña todo con una estupenda serigrafía con pegatinas indicando la funcionalidad de cada conector trasero.
No os perdais unas imagenes más y el obligado enlace a continuación con más detalles...
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 22/03/2013
No os perdais el estupendo de trabajo del usuario Falco que se ha hecho su propia versión casera del casco de Ironman. Utiliza un sencillo con fibra de vidrio para solidificar cartulina y obtener un material mucho más duro. Unos cuantos servos hacen el trabajo de abrir y cerrar el casco y a falta de colorearlo, el resultado actual es impresionante. Me pido uno para navidades... :)
No os perdais un par de vídeos de cómo lo hizo a continuación...
Leer más



