Publicado por Oscar Gonzalez
en Electrónica
el 11/02/2011
Publicado por Oscar Gonzalez
en Electrónica
el 11/02/2011
Hay muchos ejemplos de todo tipo de aparatos reproduciendo música moviendo sus motores, como por ejemplo máquinas CNC, escáners, bobinas tesla y por supuesto disqueteras. Esta última me ha llamado la atención ya que se compone de 2 disqueteras de 5 1/4" y otras dos de 3 1/2" . Mediante un pequeño circuito con un PIC18F14K50, puede ser conectada por USB e interpretar comandos MIDI para reproducir música.
El resultado es impresionante, no os perdáis el vídeo.
Leer más
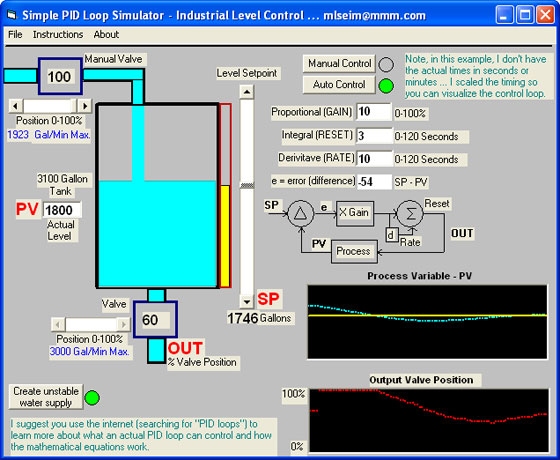
Si estás desarrollando un quadcopter pero te encuentras ya con el "problema" de la calibración del control PID estás de suerte. He encontrado un interesante enlace al código fuente de un pequeño programa hecho en Visual Basic 6 que muestra en todo su esplendor cómo funciona un control PID.
Un PID (Proporcional Integral Derivativo) es un mecanismo de control por realimentación que calcula la desviación o error entre un valor medido y el valor que se quiere obtener. Es básicamente lo que se utiliza para la estabilización de quadcopters, hexacopters etc. Para entender cómo funciona y sobre todo cómo reacciona cambiando sus parámetros de control, la aplicación simula un tanque con una entrada de líquido, una salida y un nivel de líquido que queremos mantener. En función del calculo y modificación de las tres variables del PID (Proporcional, Integral y Derivada), podremos ver las distintas respuestas del algoritmo y entenderemos qué hace cada parámetro. Es interesante ver la respuesta del ciclo de llenado/vaciado según vamos modificando las variables y nos puede dar una idea de la respuesta que queremos para nuestro objeto volador.
No os perdais el enlace y ya me contareis qué tal! ;)
Leer más
Publicado por Oscar Gonzalez
en Electrónica
el 07/02/2011
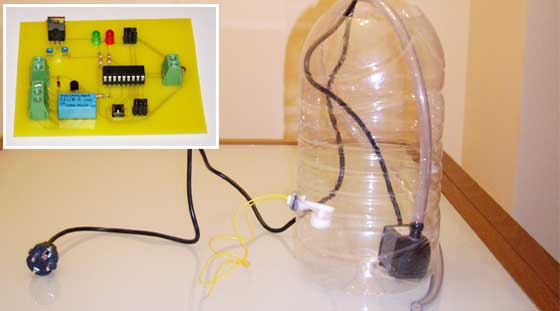
El amigo Oscar Rodriguez nos envía un interesante proyecto de un riego automático para plantas que ha realizado. Se ha encontrado con el mítico problema de regar sus plantas mientras está de viaje y lo ha resuelto con un pequeño PIC 16F628 montado sobre una pequeña PCB y mediante un relé activa una bomba de riego.
No os perdais el video y enlace con el proceso completo. Gracias Oscar!
Leer más
Publicado por Andoni Diaz Puerta
en Modelismo
el 06/02/2011
Tras recopilar información sobre quadcopters, ver otros proyectos, realizar unas cuantas pruebas con motores y controladores, me decidí tras el consejo de Oscar, de realizar una página para el proyecto, y me decidí por una wiki común para todos mis proyectos.
Espero que sea del agrado de todos, y no dudeis en colaborar, corregir, y modificar las entradas de la wiki, que para eso está :)
BricoCopter WiKi
Gracias a todos los que se han interesado por el proyecto!
Leer más
Publicado por Oscar Gonzalez
en Tecnología
el 04/02/2011
Muchos medios se han echo eco ayer cuando oficialmente se ha anunciado que se terminaron la direcciones IPv4 dejando paso paso a IPv6. El último bloque de direcciones IPv4 libre ha sido asignado y ya no quedan direcciones IPv4 disponibles que solicitar a la IANA.
Hasta ahora teníamos rangos de direcciones de 4 octetos, las direcciones del rango 255.255.255.255 (32 bits) y sus 2^32 direcciones (unas 4.000 millones de direcciones) ya han sido asignadas.
El nuevo rango de direcciones IPv6, son ahora 8 pares de 16 bits, es decir FFFF:FFFF:FFFF:FFFF:FFFF:FFFF:FFFF:FFFF, que se van a representar en hexadecimal, lo que supone 8*16=128 bits, que permitirán unas 340 sextillones de direcciones o lo que es lo mismo, un 1 seguido de 26 ceros.
Según la Wikipedia:
"340.282.366.920.938.463.463.374.607.431.768.211.456 (2128 o 340 sextillones de direcciones) —cerca de 3.4 × 1020 (340 trillones de direcciones) por cada pulgada cuadrada (6.7 × 1017 o 670 mil billones de direcciones/mm2) de la superficie de La Tierra."
En estos momentos, cabe recordar la historia de Internet en un video que os dejo a continuación...
Fuente: Linux-Party
Leer más