Publicado por Oscar Gonzalez
en Robótica
el 26/01/2018
Publicado por Oscar Gonzalez
en Robótica
el 26/01/2018
Se llama BB-9E, es el hermano mayor de BB-8 y sale en la última entrega de El Último Jedi de Star Wars. Es muy similar e igual de complejo de montar, pero como siempre James Bruton ha conseguido montar su propia versión totalmente impresa 3D y diseñada desde cero. Es un robot complejo tanto en su funcionamiento como en su manejo. La parte mecánica sobre todo hay que afinarla mucho y tenerlo todo muy bien balanceado en cuanto al reparto de pesos. En cualquier caso, os dejo a continuación los vídeos de cómo se hizo, es realmente impresionante.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 22/01/2018
Recuerdo hace muchos años cuando ya trasteaba con electrónica, que lo más de lo más era hacerse un vúmetro digital. En aquel entonces, montabas un micrófono con electrónica discreta y un preamplificador con sus diodos LED y tenías una barra que se movía al ritmo de tus cintas casete favoritas. Lo más innovador era en lugar de poner diez LEDs de un solo color, repartirlos con unos cuantos verdes, unos amarillos y unos pocos rojos como indicación de potencia. Pero era básicamente eso subían y bajaban y punto. Hoy en día con la ayuda de los microcontroladores y unas cuantas líneas de código, puedes darle una vuelta épica al mismo proyecto con animaciones realmente increíbles, tal y como te dejo en el proyecto a continuación. O quizás te guste más un vúmetros analógico.
Leer más
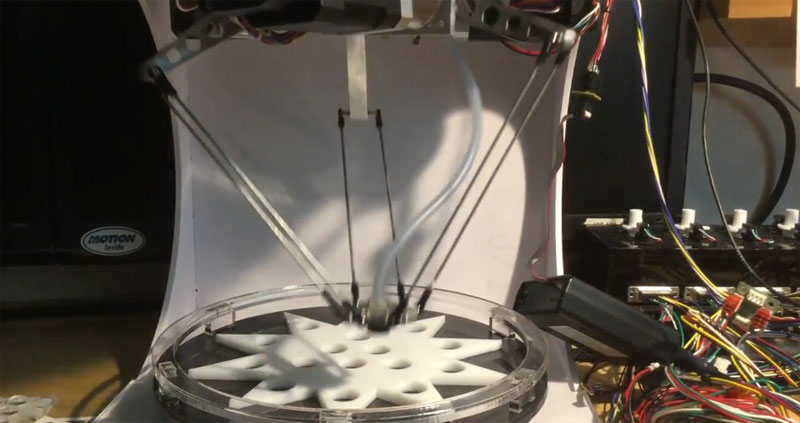
Los robots de tipo Delta son rápidos, muy rápidos ya que debido a su propio funcionamiento, la punta del brazo pesa muy poco y por lo tanto puede desplazarse muy rápidamente. El sistema delta es ampliamente utilizado en aplicaciones industriales y también en algunas impresoras 3D. Hacer un robot de éste tipo mola y mucho, pero su programación no es sencilla ya que los motores, generalmente tres, deben posicionarse con el ángulo acorde a donde queremos apuntar el cabezal. Eso se hace en base a una coordenada espacial (X, Y y Z) y calculando a la inversa la rotación exacta de los motores. A ésto se le llama cinemática inversa (inverse kinematics en inglés). A continuación os dejo un vídeo del funcionamiento de un robot delta casero para ir poniéndose calientes, pero lo más importante y quizás más interesante, es el enlace que os dejo a una función escrita en C para el cálculo de la cinemática inversa y cómo funciona.
Leer más
Con una Raspberry Pi se pueden hacer muchas más cosas que emular juegos retro, como por ejemplo utilizar la cámara para jugar con reconocimiento facial. El proyecto que te dejo a continuación lo aplica junto con una pequeña pantalla OLED. El sistema consiste en ponerlo delante tuya cuando estás delante del ordenador y cuando reconoce una cara, va contabilizando el tiempo que has pasado delante de tu PC. Una idea simple y a la vez genial que te da una estadística visual y desatendida de las horas que nos pasamos delante de la pantalla.
Leer más
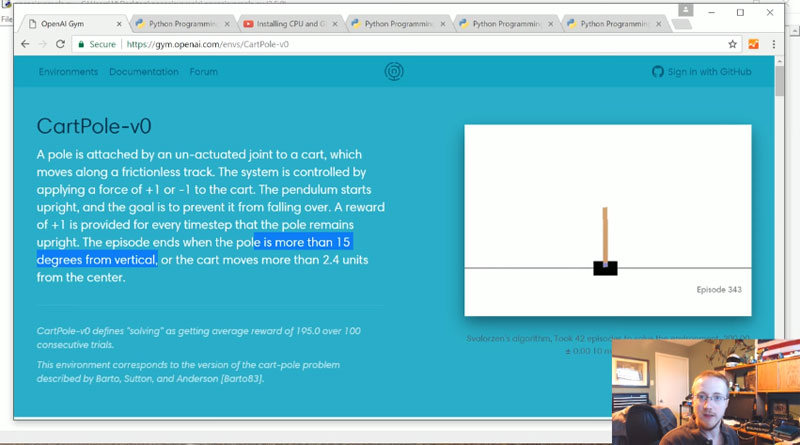
Lo bueno de utilizar redes neuronales para resolver un problema, es que puedes programarlas para que aprendan. De esta forma en lugar de programar una solución específica, lo que se hace es programar un modelo. Existen diversas herramientas que se pueden utilizar como la conocida librería TensorFlow y también Open AI. Os dejo a continuación una serie de de vídeos de Sentdex (canal de YouTube altamente recomendado si te mola el tema) que muestra cómo se puede entrenar una red neuronal para que juegue a un juego. Para eso utiliza en lenguaje Python y nos enseña a crear el modelo, entrenarlo y medir los resultados obtenidos. El mismo concepto lo puedes utilizar para una infinidad de cosas, como por ejemplo en robótica.
Leer más