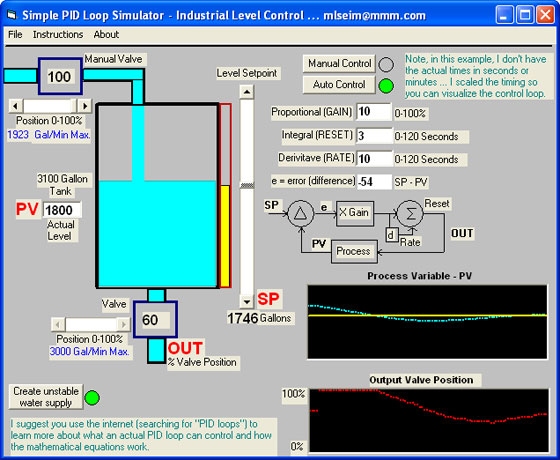
Si estás desarrollando un quadcopter pero te encuentras ya con el "problema" de la calibración del control PID estás de suerte. He encontrado un interesante enlace al código fuente de un pequeño programa hecho en Visual Basic 6 que muestra en todo su esplendor cómo funciona un control PID.
Un PID (Proporcional Integral Derivativo) es un mecanismo de control por realimentación que calcula la desviación o error entre un valor medido y el valor que se quiere obtener. Es básicamente lo que se utiliza para la estabilización de quadcopters, hexacopters etc. Para entender cómo funciona y sobre todo cómo reacciona cambiando sus parámetros de control, la aplicación simula un tanque con una entrada de líquido, una salida y un nivel de líquido que queremos mantener. En función del calculo y modificación de las tres variables del PID (Proporcional, Integral y Derivada), podremos ver las distintas respuestas del algoritmo y entenderemos qué hace cada parámetro. Es interesante ver la respuesta del ciclo de llenado/vaciado según vamos modificando las variables y nos puede dar una idea de la respuesta que queremos para nuestro objeto volador.
No os perdais el enlace y ya me contareis qué tal! ;)
Leer más
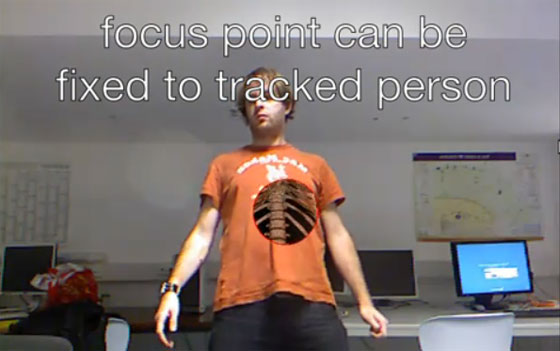
Desde la salida del driver open source para Kinect, sus aplicaciones no dejan de crecer. Aqui os dejo una muy interesante que simula los rayos X usando Kinect para ver el esqueleto de tu cuerpo en tiempo real.
Video a continuación...
Leer más
Tras el reciente anuncio del driver Open Source para Kinect desarrollado por un Español y despues de haber visto Kinect por dentro, no paran de llover aplicaciones de todo tipo que utilizan éste estupendo sensor de Microsoft. Lo último es éste que utiliza el sensor Kinect para representar una imagen tridimensional basándose en los datos recuperados. Es realmente impresionante verlo y además en tiempo real! Está basado en el trabajo original de Hector Martin que ha mostrado las especificaciones del protocolo USB de Kinect. El autor utiliza un programa realizado en C++ con un VR toolkit própio ambos disponibles en su web.
No os perdais el video altísimamente recomendado a continuación... Y ahora, quíen se anima a probar Kinect? Estamos ansiosos por verlo! :)
Leer más
Hace poquitos días hablábamos sobre cómo programar para Android con Processing y la verdad es que me ha sorprendido lo sencillo que es. También he lanzado un pequeño reto, si se le puede llamar así, que consistía en enviarme un programa de ejemplo mostrando el logo de bricogeek en un dispositivo con Android y por supuesto, programado con Processing. El amigo Alfonso López ha respondido en pocas horas y aqui os dejo un video que muestra el logo de BricoGeek en un HTC Magic. Por supuesto y como no puede ser de otra forma, nuestro amigo Alfonso se lleva de regalo un estupendo chasis 4X4 de la tienda, por las molestias que se ha tomado. Enhorabuena! :)
Os dejo el video y código fuente a continuación...
Leer más
imagen: electronics-lab
La interrupciones en el mundo de los microcontroladores son extremadamente útiles y comunmente utilizadas en todo tipo de proyectos. Hacen que el chip esté atento a un particular evento y una vez detectado, detiene su ejecución actual para ejecutar un trozo de código específico llamado ISR (Interrupt Service Routine). Que se puede hacer con interrupciones? Pueden ser utilizadas para un amplio abanico de cosas como para despertar el microcontrolador del modo Sleep al pulsar un botón (y así ahorrar energía), monitorizar un temporizador para que cuando llegue a un determinado valor se ejecute un código específico y todo esto sin preocuparnos por nuestro programa principal.
Os dejo dos estupendo enlaces, que aunque estén en inglés, serán de gran ayuda para conocer los secretos de la interrupciones con AVR y cómo utilizarlas en casos prácticos.
Leer más