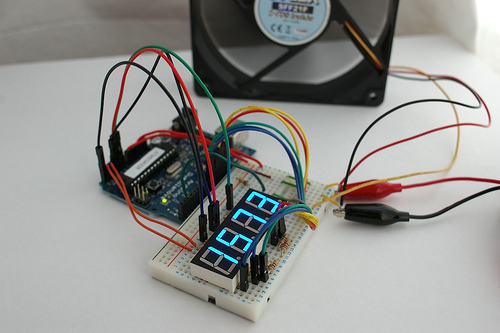
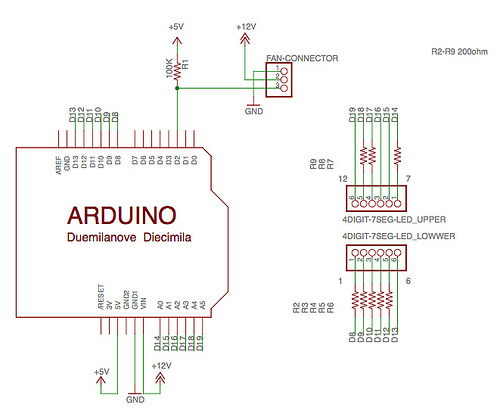
Aqui os dejo un interesante artículo que muestra cómo leer las revoluciones de un ventilador de PC mediante su pin de RPM. El método es muy sencillo ya que básicamente consiste en utilizar una interrupción para saber cuándo el ventilador da una vuelta y luego simplemente contar. El auto a añadido un pequeño display LED de 7 segmentos para visualizar las revoluciones.
Enlace: Revoluciones de ventilador con Arduino
Código fuente
# Include "SevenSegment.h"
SevenSegment seg7(19,16,15,13, // ?1,?2,?3,?4, SevenSegment seg7 (19,16,15,13, / / 1 digit, 2 digit, 3 digit, 4 digit
18,14,11,9,8,17,12,10); // A,B,C,D,E,F,G,DP 18,14,11,9,8,17,12,10); / / A, B, C, D, E, F, G, DP
unsigned long lastPulseTime; unsigned long lastPulseTime;
unsigned long pulseInterval; unsigned long pulseInterval;
// ???????????????? / / Falling edge detection pulse rotation
void senseRotation( void ) { void senseRotation (void) (
unsigned long cur = micros (); unsigned long cur = micros ();
unsigned long dif = cur - lastPulseTime; // ?????????? unsigned long dif = cur - lastPulseTime; / / difference between the previous edge
pulseInterval = (pulseInterval - (pulseInterval >> 2)) + (dif >> 2); // ???? pulseInterval = (pulseInterval - (pulseInterval>> 2)) + (dif>> 2); / / smooth
lastPulseTime = cur; lastPulseTime = cur;
} )
void setup () { void setup () (
lastPulseTime = 0; lastPulseTime = 0;
pulseInterval = 0; pulseInterval = 0;
attachInterrupt (0, senseRotation, FALLING ); // 0 = D2, FALLING = ????? attachInterrupt (0, senseRotation, FALLING); / / 0 = D2, FALLING = falling
seg7. begin (); // 7??LED???? seg7. begin (); / / 7 LED segment begins operation
} )
unsigned long lastUpdateTime; unsigned long lastUpdateTime;
void loop () { void loop () (
if (seg7. update ()){ // ??????????????????????????? if (seg7. update ()) (/ / called at short intervals as possible, so do dynamic lighting control
unsigned long cur = millis (); unsigned long cur = millis ();
if (cur - lastUpdateTime > 60){ // 60ms???LED??? if (cur - lastUpdateTime> 60) (/ / 60ms update interval LED
uint16_t rpm = 60000000 / (pulseInterval * 2); // RPM???? uint16_t rpm = 60000000 / (pulseInterval * 2); / / RPM find
seg7. print (rpm); // 7??LED???? seg7. print (rpm); / / 7 LED segment display update
lastUpdateTime = cur; lastUpdateTime = cur;
} )
} )
} )
 Control inalámbrico de motor con Arduino y LabVIEW
Control inalámbrico de motor con Arduino y LabVIEW
 DIY: Como hacer una cámara de infrarojos casera
DIY: Como hacer una cámara de infrarojos casera
 Dispensador automático de caramelos de colores con Arduino
Dispensador automático de caramelos de colores con Arduino
 Cómo encender una luz por Internet con el ESP8266
Cómo encender una luz por Internet con el ESP8266
 Cómo construir una máquina bobinadora de hilo de cobre con Arduino
Cómo construir una máquina bobinadora de hilo de cobre con Arduino
 (DIY) Cómo hacer un robot Wall-E casero
(DIY) Cómo hacer un robot Wall-E casero





